Apr
30, 2026
Athena: Open-Hardware Rescue Robot Built for the Unpredictable
emergenCITY researcher Stefan Fabian presents robot in the online tech magazine New Atlas
emergenCITY researcher Stefan Fabian presents robot in the online tech magazine New Atlas
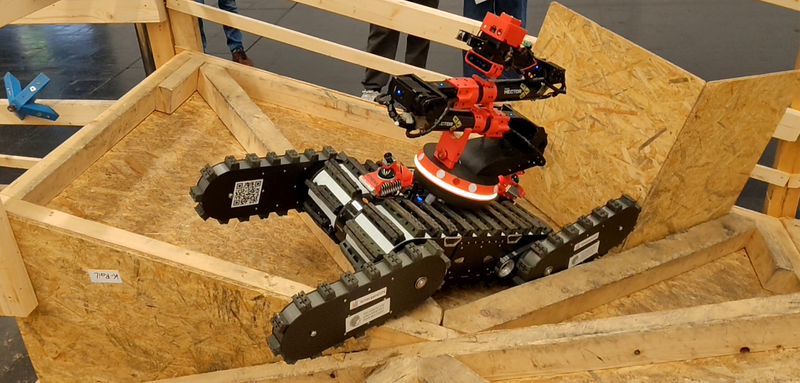
Rescue robots face a basic problem: disaster sites don’t follow a script. A mission might need a robot to climb rubble, open a valve, and squeeze through a narrow corridor - sometimes in sequence, sometimes all at once. To handle these kinds of challenges in a single platform without swapping robots mid-mission, Stefan Fabian, researcher at emergenCITY, and his team at TU Darmstadt’s SIM Group designed and built the rescue robot Athena.
Four individually controlled flipper arms attached to Athena’s tracks help to assist handling various terrains. On flat ground, the flippers tuck in but if the robot hits an obstacle, the front flippers can reach forward, hook onto the ledge, and pull the rest of the platform up. With these features, Athena has already cleared steps up to 41 cm height and stairs at 45 degree steepness during testing. The belt system of the track also lets the team swap track profiles without rebuilding the locomotion system, handy for iterating on materials.
For manipulation tasks like opening doors, pressing buttons or collecting samples, a seven-joint arm is mounted centrally on the chassis, reaching up 1.54 m with a gripper at its end and a force-torque sensor at the wrist. The arm can lift up to 7.2 kg close to the base, and 2.9 kg at full extension. Various sensors and cameras help Athena navigate and explore its surrounding. Moreover, the chassis fits in airline luggage, which is partly about keeping competition travel costs low.

Even though most robotic platforms are closed systems, which makes them expensive and difficult to modify, Stefan Fabian and the team decided to go a different way. Athena’s design files are publicly available on GitHub. The scientists are thus firmly committed to advancing the development of rescue robots.
“Building a lightweight yet powerful robot with intelligent power management and strong compute from scratch is an extremely complex task, and we hope that by open-sourcing our complete design and sharing our lessons learned, other groups that need a custom platform for their research don’t have to start from square one,” says Fabian.
A paper on the new Athena platform was presented at IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR) 2025 in Galway, Ireland.


