Apr
30, 2026
Athena: Open-Hardware-Rettungsroboter
emergenCITY Mitarbeiter Stefan Fabian stellt Roboter im Online-Tech Magazin New Atlas vor
emergenCITY Mitarbeiter Stefan Fabian stellt Roboter im Online-Tech Magazin New Atlas vor
Rettungsroboter stehen vor einem grundlegenden Problem: Katastrophengebiete sind unübersichtlich und unvorhersehbar. Eine Rettungsmission könnte zum Beispiel erfordern, dass ein Roboter über Trümmer klettert, ein Ventil öffnet und sich durch einen engen Korridor zwängt, manchmal Schritt für Schritt manchmal bestehen jedoch diese Anforderungen auch alle gleichzeitig. Um solche unterschiedlichen Herausforderungen mit einer einzigen Roboterplattform zu stemmen und nicht während einer Mission den Roboter wechseln zu müssen, haben Stefan Fabian und sein Team von der SIM-Gruppe der TU Darmstadt Athena entwickelt.
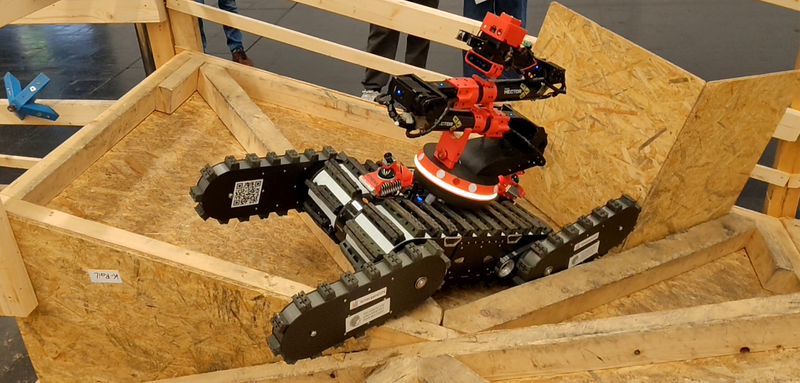
Athena nutzt ein Riemensystem, ähnlich Raupenketten, um sich auf flachem Terrain fortzubewegen. Vier einzeln steuerbare Klapparme, Flipper genannt, sind mit den Ketten verbunden und übernehmen bei unwegsamerem Gelände. Trifft der Roboter auf ein überwindbares Hindernis, strecken sich die vorderen Flipper nach vorne, haken sich an der Kante ein und ziehen den Rest der Plattform nach oben. In Tests überwand Athena Stufen von bis zu 41 cm Höhe und Treppen mit 45 Grad Neigung. Das Riemensystem ermöglicht es dem Team zudem, Spurprofile auszutauschen, ohne das Fortbewegungssystem des Roboters komplett neu zu bauen. Das ist hilfreich, um zu testen, welches Material im Einsatz am haltbarsten ist.
Für Manipulationsaufgaben ist Athena mit einem siebenachsigen Arm ausgestattet, der zentral am Fahrgestell montiert ist. Dank eines Greifers am Ende des Arms mit einer Reichweite von 1,54 m sowie einem Drehmomentsensor kann der Roboter beispielsweise Türen öffnen, Knöpfe drücken oder Proben nehmen. Der Arm kann außerdem nahe der Plattform bis zu 7,2 kg heben und bei voller Reichweite rund 2,9 kg. Wenn er nicht verwendet wird, klappt er sich flach zusammen und wird magnetisch verriegelt. Verschiedene Sensoren und Kameras helfen Athena außerdem, sich zu orientieren und die Umgebung zu erkunden. Außerdem passt das Fahrgestell ins Fluggepäck. So bleiben einerseits Reisekosten niedriger, wenn der Roboter bei Wettbewerben in aller Welt antritt.

Obwohl die meisten Konstruktionspläne für Roboterplattformen geheim sind, was ihre Anschaffung teuer und ihre Systeme schwer anpassbar macht, haben sich Stefan Fabian und sein Team für einen anderen Weg entschieden. Die Konstruktionsdateien von Athenas Hardware sind auf GitHub öffentlich zugänglich. Die Wissenschaftler verfolgen damit dezidiert den Ansatz, die Entwicklung von Rettungsrobotern voranzutreiben.
„Einen leichten, aber leistungsstarken Roboter mit intelligentem Energiemanagement und rechenstarker Hardware von Grund auf zu bauen, ist eine extrem komplexe Aufgabe, und wir hoffen, dass andere Gruppen, die eine maßgeschneiderte Plattform für ihre Forschung benötigen, durch die Open-Source-Veröffentlichung unseres kompletten Designs und des Teilens unserer gesammelten Erkenntnisse nicht bei Null anfangen müssen”, beschrieb Stefan Fabian im New Atlas.
Athena wurde in einem Paper auf der IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR) 2025 in Galway, Irland, vorgestellt.


