Jan
20, 2026
Kooperative Programmierung von Robotern
Neues Paper von Roderich Groß, PI bei emergenCITY, zu GenSwarm im npj Robotic Journal
Neues Paper von Roderich Groß, PI bei emergenCITY, zu GenSwarm im npj Robotic Journal
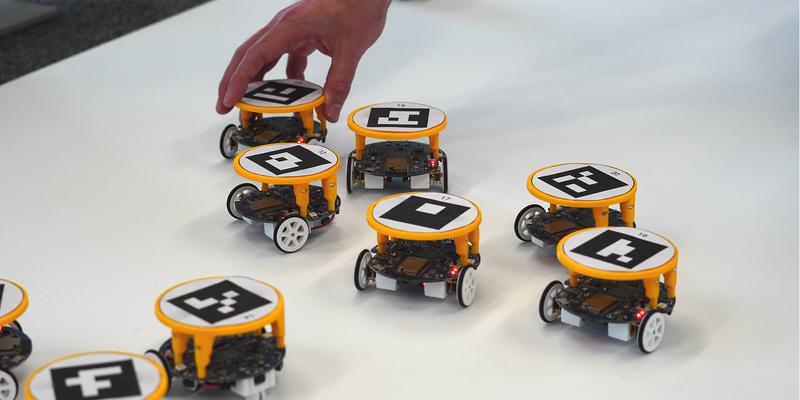
In Krisensituationen wie Bränden oder Erdbeben sind schnelle Reaktionen und Anpassungsfähigkeit von Systemen entscheidend. Technologien müssen sofort einsatzbereit sein – unabhängig davon, wer sie bedient. Was wäre, wenn eine Gruppe von Robotern allein durch die Beschreibung einer Aufgabe in einfacher Sprache koordiniert werden könnte, ohne komplexe Programmierung? Genau das ermöglicht GenSwarm.
Das System GenSwarm steht im Mittelpunkt der wissenschaftlichen Publikation „GenSwarm: Scalable Multi-Robot Code-Policy Generation and Deployment via Language Models“, die im Januar 2026 in der renommierten Fachzeitschrift npj Robotics veröffentlicht wurde. Die Studie entstand aus einer internationalen Zusammenarbeit zwischen der TU Darmstadt mit der Westlake University und der Beihang University in China, der University of Groningen in den Niederlanden sowie der University of Sheffield in Großbritannien. Zu den Autoren gehört Roderich Groß, als Principal Investigator bei emergenCITY assoziiert ist und der Professuren an der TU Darmstadt und der University of Sheffield innehat.
Das GenSwarm-System adressiert eine zentrale Herausforderung der Robotik: Die Programmierung mehrerer Roboter zur koordinierten Zusammenarbeit ist in der Regel komplex, zeitaufwendig und erfordert spezialisiertes Fachwissen. Anstatt jeden Roboter manuell zu programmieren, ermöglicht GenSwarm die Steuerung eines Roboterschwarms über natürliche Sprache, die automatisch in ausführbaren Steuerungscode übersetzt und auf alle Roboter verteilt wird. Dadurch können robotische Systeme auch in zeitkritischen Situationen schnell und flexibel neu konfiguriert werden.
In Notfallszenarien bleibt oft keine Zeit, Software neu zu schreiben oder anzupassen, und Systeme müssen von unterschiedlichen Akteuren schnell eingesetzt werden können. GenSwarm unterstützt dieses Ziel, indem es den schnellen und flexiblen Einsatz von Roboterschwärmen in Such- und Rettungseinsätzen, der Schadensbewertung nach Katastrophen, Smart-City-Anwendungen und der urbanen Resilienz ermöglicht – ohne dass spezielle Programmierkenntnisse erforderlich sind.
Ji, W., Chen, H., Chen, M. et al. GenSwarm: Scalable Multi-Robot Code-Policy Generation and Deployment via Language Models. npj Robot 4, 5 (2026). Download hier.