Jan
20, 2026
Programming Robots to Work Together
New Paper on GenSwarm Co-Authored by Associated emergenCITY PI-Roderich Groß published in npj Robotic journal
New Paper on GenSwarm Co-Authored by Associated emergenCITY PI-Roderich Groß published in npj Robotic journal
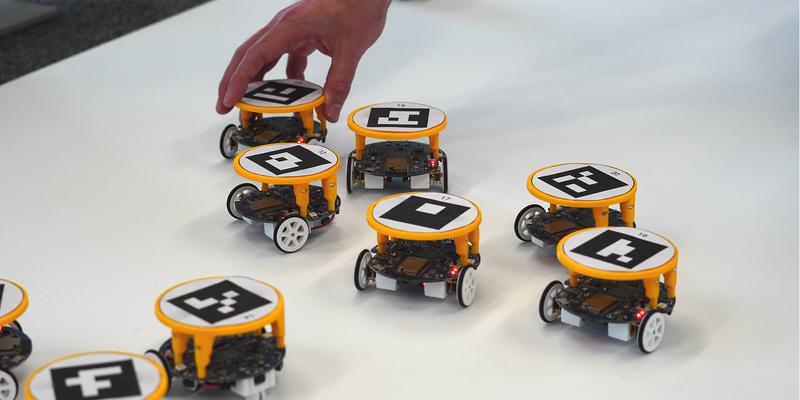
In crisis situations such as fires or earthquakes, speed and adaptability are critical. Technologies must work immediately, regardless of who is operating them. What if a group of robots could be coordinated simply by describing a task in plain language, without the need for complex programming? This is exactly what GenSwarm enables.
The system GenSwarm is the focus of the research paper “GenSwarm: Scalable Multi-Robot Code-Policy Generation and Deployment via Language Models”, published in January 2026 in the renowned journal npj Robotics. The study was conducted by an international research team from TU Darmstadt, Westlake University and Beihang University in China, the University of Groningen in the Netherlands, and the University of Sheffield in the United Kingdom. Among the authors is Prof. Dr. Roderich Groß, who is an Associated Principal Investigator at emergenCITY and holds professorships at TU Darmstadt and the University of Sheffield.
The GenSwarm system addresses a major challenge in robotics: programming multiple robots to work together is usually complex, time-consuming, and requires expert knowledge. Instead of manually coding each robot, GenSwarm allows users to issue natural language instructions, which are automatically translated into executable control code and deployed across an entire robot swarm. This approach enables rapid reconfiguration of robotic systems, even in time-critical situations.
In emergency scenarios, there is often no time to write or modify software, and systems must be deployed quickly by different actors. GenSwarm supports this goal by enabling fast and flexible use of robot swarms in search and rescue operations, disaster assessment, smart city applications, and urban resilience, without requiring specialized programming skills.
Ji, W., Chen, H., Chen, M. et al. GenSwarm: Scalable Multi-Robot Code-Policy Generation and Deployment via Language Models. npj Robot 4, 5 (2026). Open access here.